In the last decade, most waste electrical and electronic equipment (WEEE) has been landfilled, burned or transported to developing countries. 88,000 tons of WEEE (data from 2011) are generated each year in Austria, of which 5,000 tons are declared hazardous waste. Therefore, E-waste recycling is seen as particularly important to reduce environmental pollution and save resources. The disassembly of defective products allows the reuse of parts and materials but is usually carried out manually. Generally, already existing industrial disassembly plants have only a small automated part and are typically directly tailored to a specific product type. This limits the flexibility with respect to changing product series as well as the adaptivity of the entire plant in the recycling process. The continuously increasing amounts of WEEE requires a higher degree of automation for more efficiency. Especially since there are currently millions of products in the consumer sector that are at the end of their life cycle and for which we do not know exactly how to take them apart.
In the last decade, most waste electrical and electronic equipment (WEEE) has been landfilled, burned or transported to developing countries. 88,000 tons of WEEE (data from 2011) are generated each year in Austria, of which 5,000 tons are declared hazardous waste. Therefore, E-waste recycling is seen as particularly important to reduce environmental pollution and save resources. The disassembly of defective products allows the reuse of parts and materials but is usually carried out manually. Generally, already existing industrial disassembly plants have only a small automated part and are typically directly tailored to a specific product type. This limits the flexibility with respect to changing product series as well as the adaptivity of the entire plant in the recycling process. The continuously increasing amounts of WEEE requires a higher degree of automation for more efficiency. Especially since there are currently millions of products in the consumer sector that are at the end of their life cycle and for which we do not know exactly how to take them apart.
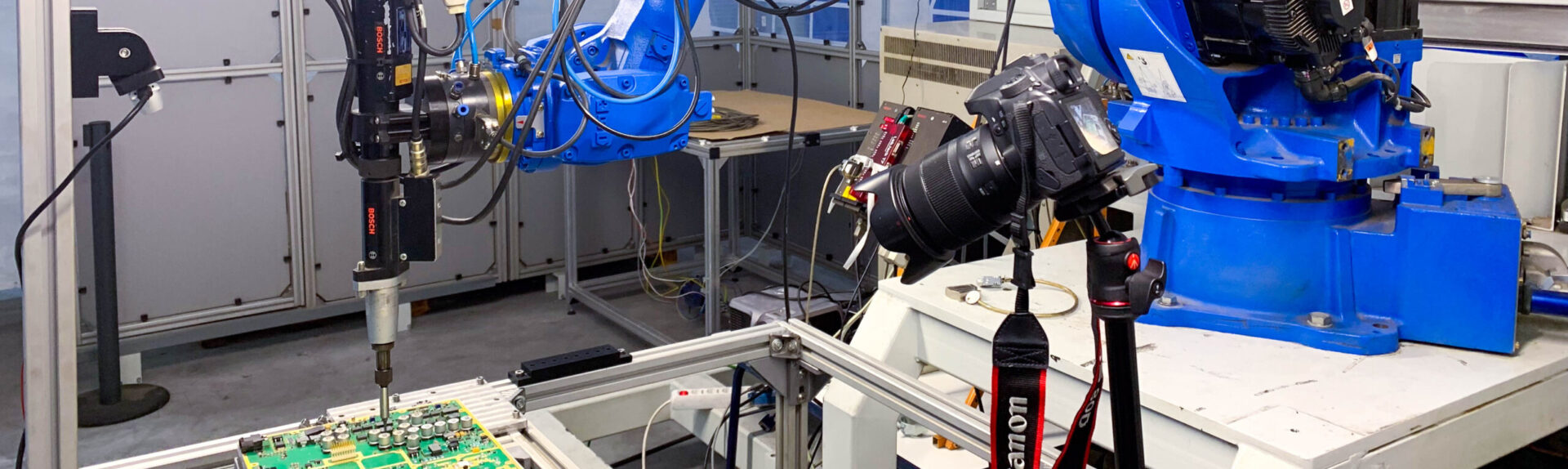
Our goal is to develop and implement an automated knowledge-driven robot-centric disassembly system that autonomously adapts to the constraints and limitations necessary to disassemble a given product. A systematic approach to automate the disassembly process is achieved by applying knowledge-based systems. They semantically link individual activities such as detection, gripping, manipulation and existing individual disassembly operations. The use of machine-interpretable semantics enables integrated intelligent components of a disassembly system to combine the product concept, the disassembly sequence, and the necessary scheduling processes as well as the required disassembly tools in such a way that automatic reasoning, as well as data integration, is possible. The semantic representation of the product model is linked with an image recognition system to realize an automatic identification. Subsequently, image processing methods are integrated into the optimization algorithms of path planning and model-based robot control in order to achieve a dynamic specification of the robot’s motion sequence for the individual disassembly processes. The data required for this purpose will be obtained with different sensors and then merged.
The SmartDis system will be implemented as a demonstrator for the disassembly of desktop PCs and tested and evaluated in a laboratory environment at ACIN of TU Vienna, Chair of Automatic Control of Kiel University as well as at PRIA. The applicability of the system, as well as the ability to use the system for a wider range of products in waste separation, will be demonstrated in one another use case (disassembly of the antenna amplifiers) provided by the industrial partner Augusta.

Smart Disassembly with a Knowledge-based Automation System